Навесное оборудование для МОТОБЛОКА и МИНИ ТРАКТОР | Автор топика: Kartika


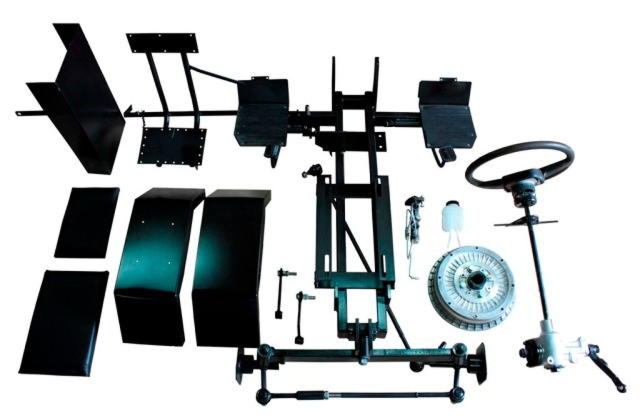
КИТ набор предназначен для переоборудования мотоблока.
Павел (Kartika) Да Андрей кит 5 стоит 53 900
Tags: Как сделать навесное оборудование для мотоблока
Не поленился собрать все навесное вместе. Что-то пришлось выкинуть, так как собралась порядочная куча. На...





Сельхозробот
У Розова в его утопиях малогабаритные поля на атоллах обрабатываются разнообразными комбайнами на базе квадроциклов. Зачастую, автоматизированными, и способными выполнять обработку поля без операторов по заданной программе.
В реальности на полях и огородах квадроциклов не наблюдается. Либо двухколесные мотоблоки, либо полноценные минитрактора на полтонны железа.
Мотоблок отличается от трактора тем, что оператор фактически является частью конструкции. Причем вполне себе силовым элементом. Поэтому для какой-либо автоматизации процесса не может быть и речи. Без рук и спины
оператора просто невозможно развернуть машину, или подать необходимое усилие на плуг.
Это даже если не рассматривать уродских калужских конструкций, при которых часть операций с активным навесным оборудованием выполняется исключительно задним ходом, и манипулирование коробкой передач недоступно, поэтому при необходимости сдать назад приходится тянуть все это хозяйство руками, выжав сцепление.
Опыта работы с мини-тракторами у меня нет, но, насколько я понимаю, принципиальной разницы с МТЗ-80 там нет. А с МТЗ-80 я имел дело. Фактически система управления непринципиально отличается от системы управления легковой машиной с механической коробкой - ну добавлена ручка фиксированного газа, ну добавлена возможность раздельно тормозить правое и левое заднее колесо, ну нельзя переключать передачи на ходу.
У мотоблока, кстати есть ТОЛЬКО ручка фиксированного газа. Ну с педалями у него вообще тяжко, а вот ручку наподобие мотоциклетной можно было бы и приделать, чтобы иметь возможность оперативно поддать газку по отношению к фиксированному положению ручки.
Но в любом случае, все эти органы управления - механика с приводом от водителя, и автоматизации поддаются плохо. Правда, на тракторе, в отличие от мотоблока, есть и электросистема, и гидросистема. И созданием
необходимых усилий для подъема-опускания навесных орудий занимается именно гидравлика.
Соответственно, если дизайнить агрегат, позволяющий производить обработку полей таких размеров, какие сейчас обрабатывают мотоблоками, примерно таким способом, каким пылесос «Румба» производит обрабоку полов, то этот агрегат должен отличаться и от мини-трактора, и от мотоблока.
Во-первых, четыре колеса - это обязательно. Даже если мы предополагаем обработку почвы фрезой. Поэтому фреза переходит в разряд активного навесного оборудования, как, впрочем и у тяжелых мотоблоков.
Во-вторых, сцепные узлы должны быть снабжены какой-то системой, позволяющей их опускать и поднимать, причем с усилием, сравнимым с весом машины. Не уверен что на машине массой примерно полтораста килограмм
осмыслено разводить и электрику, и гидравлику (а электрика нужна для того чтобы работала система управления). Возможно можно сделать электрический привод, например винтовой, который будет с этой задачей справляться.
В общем, получается квадроцикл весом без оператора порядка 150 кг, с колесами не менее полметра диаметром, и электроусилителем руля. Мощность вероятно от 8 до 12 л.с., число передач - примерно как у «Беларуси».
Все четыре колеса - ведущие. Руль вроде велосипедного, хотя внутри полноценная рулевая трапеция, а не просто сплошная ось, поворачивающася целиком. Ширина колеи 70 см.
С рулем есть некоторые (вполне решаемые) инженерные сложности. Во-первых, по обычным соображениям graceful degradation, машина должна управлятся рулем при полностью неработоспособной электросистеме. Во-вторых, электрический привод на руль должен позволять рулить машиной в остутствие оператора. В-третьих,
если есть исправный электропривод, руление машиной не должно требовать от оператора избыточных усилий.
Два вала отобора мощности - вперед и назад. Причем и спереди и сзади имеется узел сцепки навесного оборудования, оснащенный подъемным механизмом, который имеет три сменных «наконечника» - два примерно
таких, какие есть у моего мотоблока - сцепка для плугов/прицепов/лопат и винтовое соединение с валом отбора мощности для активного оборудования (косилок и фрез). Эти два вида наконечников должны быть совместимы с
какой-нибудь распространенной моделью мотоблока, чтобы воспользоваться меющимся на рынке выбором навесного оборудования. Кое с каким из этого навесного оборудования робот вполне справится. В смысле действий кроме
поднять/опустить, подать мощность на вал/остановить вал не потребуется.
Третий вид сцепного устройства - форкоп совместимый с обычными прицепами для легковых автомобилей. Поскольку у нас четыре колеса и сидение для водителя, нам нет нужды использовать спецтележки вроде мотоблочных, и
можно ориентироваться на богатый рынок автомобильных прицепов.
В качестве дополнительных, не производимых для обычных мотоблоков, навесных устройств к этому квадроциклу необходимы:
Почвообрабатывающая фреза (которая вешается на подвеску для активного оборудования, а не вместо колес)
Активные (пока мне неочевидно - на принципе фрезы или просто вибрирующие наподобие тракторной картофелекопалки) окучники и картофелекопалки.
Потому как без оператора машина весит слишком мало, чтобы лопатить землю лемехом, который просто тянет за собой. При таком весе для этого нужен не колесный, а копытный движетель. Поэтому нужен активный лемех.
Помимо ручного управлениия, предусмотрено электронное, которое может быть либо дистанционным (вплоть до использования обычного Wi-Fi) либо автоматизированным.
На руле у этой штуки монтируется система вроде «Кинеста», которая работает «глазами». Основное назначение - не дать устройству управлямому роботом или даже дистанционно, наехать на препятствие или живое
существо, выскочившее перед машиной.
Кроме того, для позиционирования устройства на поле можно использовать вращающуюся головку с лазером и фотоэлементом, и три расставленных по углам уголковых отражателя. Эта вращающаяся головка должна быть
смонтирована на шесте, торчащем выше головы оператора, как сидящего на машине, так и стоящего рядом с ней. Хотя, может быть для оператора безопаснее использовать не лазер, а тот же диапазон радио, который
используется в Wi-Fi.
Cоответственно типичный способ работы - это оператор проводит устройство (с косилкой или фрезой) по краю обрабатываемого участка, а потом дает команду «рбработай все внутри этого контура». Еще лучше чтобы устройство
могло бы запомнить контуры нескольких полей и будучи выведено оператором в произвольную точку контура поля дальше все делало само. Правда, для этого придется либо намертво закреплять на всех полях уголковые
отражатели, либо учить устройство ориентироваться по визуальным ориентирам.
А для газонокосилки имеет смысл режим ну совсем похожий на работу робопылесоса - косить все подряд, объезжая любые препятствия выше высоты травы. Главное, чтобы она при этом слишком далеко не убежала.
Естественно, машинка должна быть оборудована датчиками запаса топлива, и уметь сама возвращаться к месту дислокации для дозаправки. В комплект, поставки возможно стоит включить нечто вроде бензоколонки, которой робот сможет воспользоваться самостоятельно.
Ну и инженерный challenge - стоить эта штука без комплекта навесного оборудования и прицепа должне не более 1500-2000 евро.
This entry was originally posted at http://.dreamwidth.org/682234.html. Please comment there using OpenID. Now there are

Навесное оборудование для мотоблока Нева своими руками ...
Как сделать навесное оборудование для мотоблока своими руками. Мотоблок является одним из наиболее полезных оборудований на дачном или ...


 Как отремонтировать топливный насос на минитракторе
Как отремонтировать топливный насос на минитракторе Как починить бензиновую газонокосилку, при возникновении небольших неполадок
Как починить бензиновую газонокосилку, при возникновении небольших неполадок Как можно отремонтировать трещины в пластике на минитракторе?
Как можно отремонтировать трещины в пластике на минитракторе? Причины, по которым из мотоблока может происходить утечка масла
Причины, по которым из мотоблока может происходить утечка масла Какое масло использовать в бензопиле?
Какое масло использовать в бензопиле?