Необычные российские и советские вездеходы

Россия - Родина настоящих внедорожных вездеходов.
Первым автомобилем-вездеходом может считаться Руссобалт-Кегресс. В 1909 году, А.А. Кегресс сконструировал и испытал первый прототип автомобиля повышенной проходимости совершенно нового типа, не имеющего аналогов в мире, предназначенный для езды по снегу. При стандартных колесах передней управляемой оси, поставленных на широкие лыжи, колеса задней ведущей оси были заменены гусеничным движителем оригинальной конструкции, представляющей собой ленту из верблюжьей шкуры, натянутую на специальные барабаны. В 1911 году Кенресс сделал движитель на основе резиновой ленты, выпуск которой освоил петербургский завод «Треугольник», и испытал его на машинах Мерседес и «Руссо-Балт». Так был построен первый в мире снегоход.

В августе 1916 года прапорщик русской армии А.А.

В предвоенные и военные годы вездеходная техника создавалась в рамках конструкции Кегресса или на танковых и тракторных шасси.
1947году был создан первый гусеничный снегоболотоход.
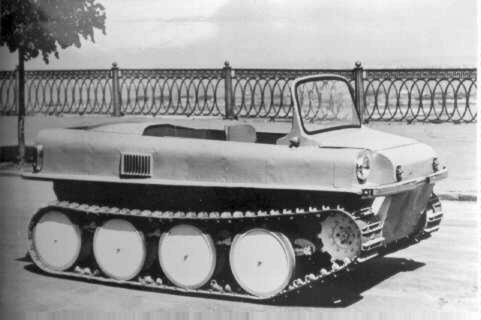
Машина, которой тогда присвоили условное обозначение ГПИ-С-20, предназначалась для перевозки людей и грузов, а также буксировки прицепов по снежной целине и заболоченной местности. У нее был кузов обтекаемой формы, конструктивно разделенный на три части: в передней части располагались места водителя и одного пассажира, все органы управления и контроля, а также главная передача и механизм поворота. Средняя часть служила для размещения семи пассажиров. Под сиденьями последних проходили карданная передача, тяги управления и трубы обогрева кузова. Наконец, задняя часть ГПИ-С-20 представляла собой моторный отсек, отделенный от остальной части герметизированной переборкой.

Силовой агрегат, трансмиссия, главная передача, системы питания и электрооборудования снегоболотохода были унифицированы с серийным грузовиком ГАЗ-51, а механизм поворота его создатели позаимствовали у армейской «самоходки». Ходовая часть включала две резинотросовые гусеничные ленты, ведущие колеса и опорные катки с пневматическими шинами. ГПИ-С-20 имела грузоподъемность
0,8 тонны, развивала максимальную скорость 50 км/ч по шоссе и до 30 км/ч по снежной целине, запас ее хода составлял 200 и 500 км по шоссе и по снежной целине соответственно.
Эта машина могла преодолевать рвы и броды глубиной до 0,8 метра, но, увы, еще не умела плавать. Поэтому все последующие усилия инженеров-конструкторов ГПИ были брошены именно на создание плавающей версии снегоболотохода.

ГПИ-23, грузоподъемность которого на плаву достигала пяти тонн, получил цельнометаллический сварной корпус с каркасом из стандартных профилей, обшитый листовой сталью, и установленный в передней части корпуса дизель ЯАЗ-204В. Трансмиссия ГПИ-23 состояла из главной передачи автомобильного типа, бортовых фрикционов и карданных передач, а ходовая часть – из двойных опорных катков (по шесть пар с каждой стороны), ведущих и направляющих колес, независимой торсионной подвески и двух резиноленточных гусениц. Грузовая платформа оборудовалась брезентовым тентом.
ГПИ-С-20, ГПИ-21, ГПИ-22 и ГПИ-23 прошли все-сторонние испытания, однако так и остались опытными образцами. Но труды политеховцев не пропали даром: несколько позже, используя, разумеется, прежние наработки в этой области, за создание снегоболотохода взялся коллектив конструкторско-экспериментального отдела Горьковского автозавода. В 1954 году ГАЗ-47, или, как его еще называли, ГТ-С, был запущен в серийное производство. ГПИ же тем временем сконцентрировал свои усилия на несколько ином направлении – теперь здесь осуществляли разработку миниатюрных гусеничных плавающих снегоболотоходов. Так, к примеру, в 1960 году на свет появился ГПИ-37, базировавшийся на агрегатах легкового автомобиля «Москвич-407».
ГПИ-37 с грузоподъемностью 0,5 тонны и буксировавший прицеп массой до 0,5 тонны, представлял собой вездеход с цельнометаллическим корпусом и наружной обшивкой из дюралюминия. Для защиты экипажа от ветра и непогоды предусматривался легкосъемный тент. «Москвичевский» двигатель был установлен в передней части корпуса, ходовая часть состояла из двух резино-тканевых гусеничных лент с металлическими грунтозацепами, расположенных сзади ведущих колес, а также опорных и направляющих катков. Подвеска опорных катков была выполнена независимой, торсионной. ГПИ-37 отличался малым средним удельным давлением на грунт –
0,095 кг/кв. см без груза и 0,127 кг/кв. см с грузом.
В 1964 – 66 годах были созданы две модификации снегоболотохода на агрегатах ЗАЗ-966 – С-ГПИ-19 и С-ГПИ-19А. С-ГПИ-19 и С-ГПИ-19А грузоподъемностью 0,25 тонны позиционировались как «легкие плавающие гусеничные снегоболотоходы со сварным корпусом открытого типа каркасной конструкции и планетарным одноступенчатым механизмом поворота для использования в качестве
внутрихозяйственного транспорта рыболовецких и охотничьих хозяйств, для нужд связи, медицинского обслуживания и других целей в условиях Крайнего Севера».

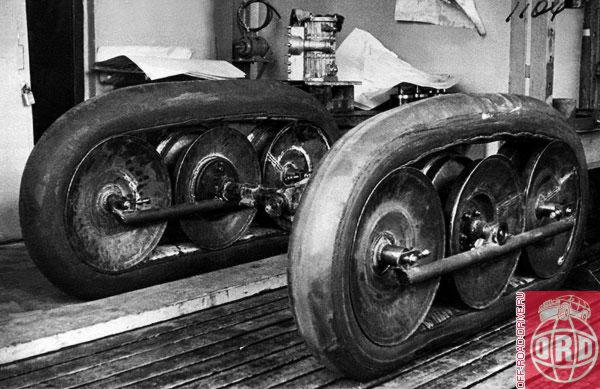
В ГПИ были начаты также работы по созданию гусеничного пневматического движителя. Сама идея пневматической резино-кордовой гусеницы возникла из стремления конструкторов избежать недостатков, присущих как пневмокаткам низкого давления, так и обычным ленточным гусеницам. Таким образом, «пневмогусеница» явилась как бы логическим развитием колесных и гусеничных движителей. Под пневматической гусеницей следует понимать замкнутую оболочку (или совокупность таких оболочек) с избыточным внутренним давлением воздуха, функционально заменяющую гусеничную цепь. Пневмогусеничный движитель, совмещая свойства эластичного колеса и традиционной гусеницы, имеет целый ряд новых, присущих только ему качеств.
В начале 1962 года был изготовлен первый макетный образец пневмогусеничного движителя трубчатого типа.
Исследование эксплуатационных качеств автомобиля проводились в осенне-зимний период 1963–1964 года. В частности, был совершен пробег протяженностью 120 км по маршруту Ступино – Москва. С-3 был способен «бесшумно» двигаться по асфальту со скоростями порядка 50-60 км/ч. Значительно улучшилась и плавность хода машины. НАМИ С-3 уверенно передвигался по плывунам. И это при том, что полноприводные «Урал-375» и ЗИЛ-485 в этих условиях полностью теряли подвижность, погружаясь в грунт до мостов. А вот в условиях снежной целины ввиду отсутствия грунтозацепов гусеница легко буксовала по скользкой поверхности.

Энергетическое несовершенство трубчатой пневмогусеницы (связанное со значительными затратами мощности на перематывание), увеличенная поперечная податливость, а также стремление увеличить тягово-сцепные качества на грунтах с низкой несущей способностью, привели к созданию деформированной протекторной поверхности. Гусеница подобного типа получила название «сотовой» пневмогусеницы. Наличие «сот» должно было значительно повысить поперечную жесткость профиля и резко уменьшить потери на перематывание.
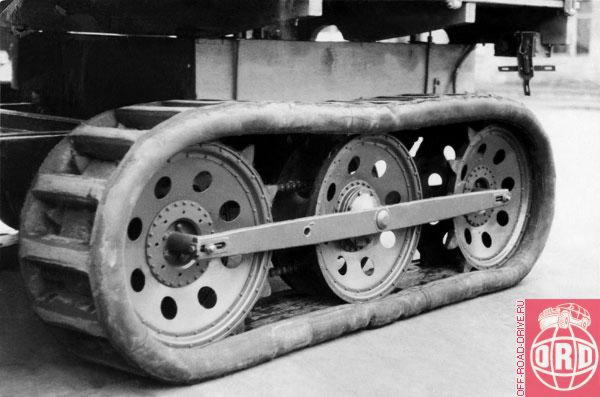
Поперечные трубки служили мощными грунтозацепами, а впадины обеспечивали уплотнение рыхлого грунта и снега без выдавливания его из зоны деформации.

Испытания вездеходов НАМИ С-3 и НАМИ С-4 наглядно показали, что «полугусеничный» вариант не позволяет выявить все качества пневмогусениц ввиду погрешностей, вносимых передними колесами. Чтобы более подробно исследовать особенности их работы, в 1964 году был спроектирован, а в 1965 году изготовлен макетный образец сочлененной машины НАМИ-О106.

Ходовая часть вездехода НАМИ-О106 была унифицирована с ходовой частью автомобиля НАМИ С-3М. Но на ней установили четыре пневмогусеницы шириной 300 мм. НАМИ-О106 состоит из двух активных секций. Передняя – ведущая постоянно, привод же на заднюю включается по желанию.
Машина показала хорошую проходимость. Она уверенно двигалась по пересеченной местности, хорошо приспосабливалась к неровностям и преодолевала крутые подъемы. Сочлененная машина показала хорошую проходимость на снегу, болоте и проселочной дороге. Автомобиль обладал очень хорошей маневренностью на снегу. Радиус поворота составлял 5,5 м по колее наружной гусеницы. Вездеход уверенно преодолевал заснеженные подъемы крутизной около 25°.
Испытания на озере показали, что машина вполне прилично держится на плаву, обладает хорошей маневренностью, но тяги гусениц в этом случае явно недостаточно – желательна установка гребного винта. Также было отмечено, что вездеход легко выходит на заболоченный берег.
Дальнейшее стремление улучшить показатели пневматических гусениц привело к созданию звенчатых (секционных) пневмогусениц. Они устанавливались на движители, смонтированные на заднем мосту автомобиля УАЗ-469 по схеме, аналогичной с автомобилями НАМИ 3-С и НАМИ 4-С.

Тема звенчатых пневмогусениц получила дальнейшее развитие в ОНИЛВМ , в 70е-80е годы.

Был создан болотоход СТПР-6901-01, а также улучшенна конструкция пневмогусеничного движителя для болотоходных экскаваторов.

В 80-е годы также проводились исследования экспериментальных тяжёлых колёсных платформ. В 1981 г. ОНИЛВМ была привлечена в качестве соисполнителя к работам по теме "Исследование сравнительных характеристик управляемости и проходимости колесного и гусеничного шасси". Был создан ходовой исследовательский полноразмерный макет ГПИ-3901 колесного шасси (4х4, 6х6, 8х8 ) полным весом 5 - 9 т с бортовой (силовой) схемой поворота.

Так же в этот период было создано и испытано более десятка различных образцов средств повышения проходимости колесных машин. Эти исследования проводились с 1983 по 1987 г. по хоздоговорам с ВНИИТРАНСМАШем (г. Санкт-Петербург).



Широкие возможности изменения параметров ходовой части макета ГПИ-3901 позволили провести обширные исследования характеристик управляемости и проходимости колесного шасси.

Источник
Tags: Россия, техника
Tags: Как сделать гусеничный вездеход своими руками чертежи фото из ВАЗ 2106
Гусеничный вездеход «Микрон» с двигателем от ВАЗ 2106 своими руками






Как лучше сделать вездеход?? | Автор топика: Алена
Мужик собрался делать вездеход на колесах низкого давления! На данный момент есть двигатель от ВАЗ2106, коробка тоже от 2106, два моста, один от Волги, другой от шестерки и раздатка от нивы! Железа дома всякое есть, навалом) а соображений по поводу вездехода нет, это будет моя первая самоделка! В интернете смотрел, вездеходы с двигателем от машины не находил... Кто что может подсказать? спасибо за советы)
Анна хлопотно это.:)
Саша

Елизавета Мосты от разных автомобилей применять не надо.
Роман

Михаил И не найдешь. Такой вес на камерах не реально.
Ярослав

Вера видел на ютубе с вазовским двигателем и мостами плавающий .полазь еще найдешь
Ольга Посмотри подшивки Наука и жизнь. Одному сложно, нужен ещё помощник. Начни с начала с караката Нужен мотоблок для начала. Успехов!
Екатерина Почему нет? Вперёд! Только сварщик нужен. Ищи в Ютуб как сделать пневматы низкого давления. Мосты жигулёвские? - делай пневматы на жигулёвских дисках. Только камеры нужно будет очень большие, чтоб вес всего ТС выдержали и не тонули. Предполагаю, что камеры будут нужны с кировца или касика.
Моста два жигулёвских? А поворачивать как? - как и кировец и касик! ламаться пополам!
Ещё вопросы есть?
Гусеничные вездеходы своими руками - схемы, фото, чертежи в ...
Фото, описания конструкций, чертежи и инструкции для ... Сделать самодельный гусеничный вездеход своими руками. ... Конструкция самодельного гусеничного вездехода основана на автомобиле Ваз. Двигатель - Ваз 09, ...



 Как отремонтировать топливный насос на минитракторе
Как отремонтировать топливный насос на минитракторе Как починить бензиновую газонокосилку, при возникновении небольших неполадок
Как починить бензиновую газонокосилку, при возникновении небольших неполадок Как можно отремонтировать трещины в пластике на минитракторе?
Как можно отремонтировать трещины в пластике на минитракторе? Причины, по которым из мотоблока может происходить утечка масла
Причины, по которым из мотоблока может происходить утечка масла Какое масло использовать в бензопиле?
Какое масло использовать в бензопиле?